

Flexible Kontextmodellierung
Szenariopartner
Inhalt
Serviceroboter müssen häufig mit einer neuen oder geänderten Umwelt interagieren (Layoutänderungen). In der Regel hat dies eine tiefgreifende Veränderung des Systems zur Folge. Um diese Anpassungen flexibler zu gestalten und auch durch Nicht-Robotiker durchführbar zu machen, wurde eine Methode entwickelt, welche es Logistik-Experten ermöglicht den Kontext, in dem ein Roboter arbeiten soll, auf einfache Art und Weise zu modellieren. Hierzu wurde ein Software-Tool entwickelt, welches die Modellierung des Roboterkontexts (z.B. Stationen, Regale und Artikel) ermöglicht (siehe Bilder unten links).
Zur Darstellung dieser Flexibilität wurde Szenario 1 (autonomer Kommissionierprozess) durch die einfache Modellierung der Umwelt erweitert. Das Szenario zeigt, wie der Kommissionierprozess direkt hintereinander in zwei unterschiedlichen Umgebungen durchgeführt wird. Zur Anpassung des Roboterverhaltens an die geänderte Umwelt ist lediglich eine Bearbeitung des Modells durch einfache grafische Drag&Drop-Aktionen notwendig.
Die folgenden Bilder zeigen das reale Roboterumfeld (rechts) und dessen Modell im entwickelten Software-Tool (links), sowohl vor (oben) als auch nach (unten) der Änderung.

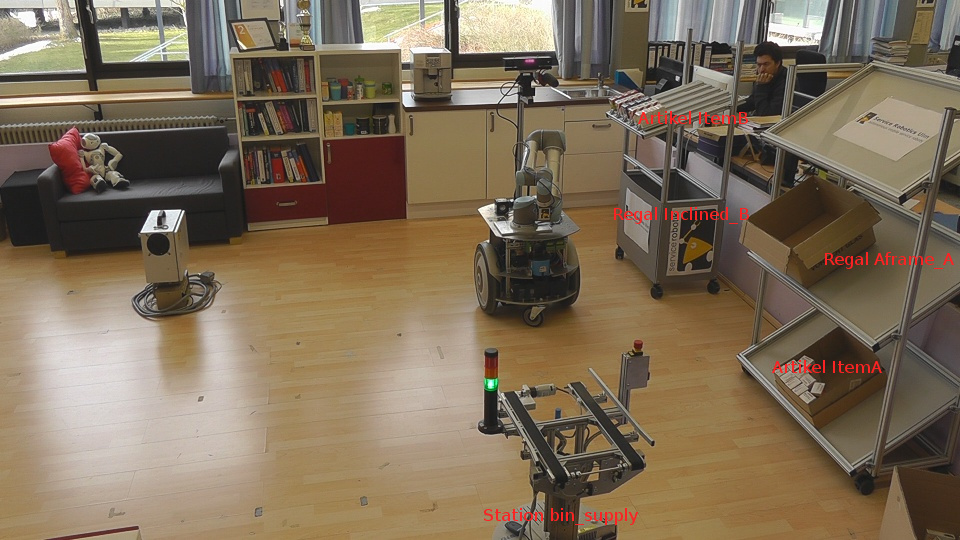


Demonstration im Laborumfeld der Hochschule Ulm
Ergebnis
Aufbauend auf den Ergebnissen von Szenario 1, welches Kontextwissen zur Laufzeit nutzt, um das Roboterverhalten (Komponentenauswahl) flexibel zu gestalten, wurde gezeigt wie dieses Kontextwissen auf einfache Art und Weise konfiguriert werden kann. Ändert sich also das Umfeld (z.B. Positionen/Typen von Stationen, Regalen oder Artikeln) des Robotersystems kann diese Änderung einfach durch einen Mitarbeiter ohne tiefes Robotikwissen modelliert werden.
Dies zeigt wie die Flexibilität, welche bei Layoutänderungen notwendig ist, für Anwender bereitgestellt werden kann.